
By: Leonid Menis
In the same way that the Highways System enabled the private vehicle to reach its mobility and safety potential, the smart road infrastructure is a key enabler for the many critical mobility and safety use cases of the automated vehicle.
Let’s look at some examples.
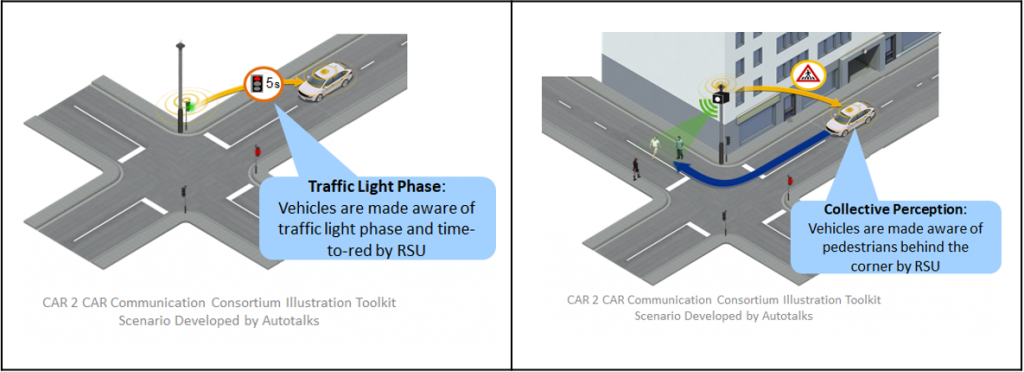
Reliable detection of the traffic light state was and still remains a challenge for an automated vehicle. Traffic light shapes and sizes, weather, lighting conditions, and other environmental factors can confuse computer vision systems. Detection with a probability of even 99.9999% still may not be good enough, since it will result in 1 out of a million drives running a red light (not a negligible number in modern megacities).

Another key challenge for the automated vehicle is detecting objects and events which are beyond its field of vision. Think of a kid on a bike emerging from behind a parked car in front of you, or a speeding vehicle appearing from behind the corner of a blocked intersection as you are about to cross it. It was discussed in length that the V2X sensor (https://auto-talks.com/10-things-you-should-know-about-v2x/ ) may be the only sensor that can detect such occurrences due to line-of-sight limitations of vision-based sensors, such as camera or lidar.
The smart Road Side Units (RSUs) equipped with V2X technology will help automated and non-automated vehicles detect potential dangers that cannot be seen: For example, referring to the detection of the traffic light state, by disseminating traffic light phase using V2X signal. Referring to the second example of a car speeding into a visually blocked intersection, the smart RSU can detect with its camera and transmit the location of any object in its field of view using the V2X capabilities.
Vehicles equipped with the V2X sensor will receive warnings of such potential dangers and will be expected to react accordingly, slowing down or braking, if needed, to avoid a collision. In the case of an automated vehicle, the actuation of the brakes is triggered by the SW executed by the onboard processor.
Vehicle actuation by an electronic component should be analyzed according to the principles of Functional Safety (ISO26262 standard). More details on the topic of Functional Safety for V2X sensors in the vehicle can be here (https://auto-talks.com/technology/functional-safety). In the examples above, the V2X sensor embedded in the infrastructure participates in the Safety use case, by providing critical input to the vehicle. For this reason, it is important to extend the Functional Safety analysis to the V2X electronics in the RSU.
The vehicle should be able to trust the information received from the infrastructure. RSU failure cannot lead to risking lives. This implies that RSUs should be designed for functional safety.
The below is a high-level diagram of the RSU with embedded object detection and V2X sensor:
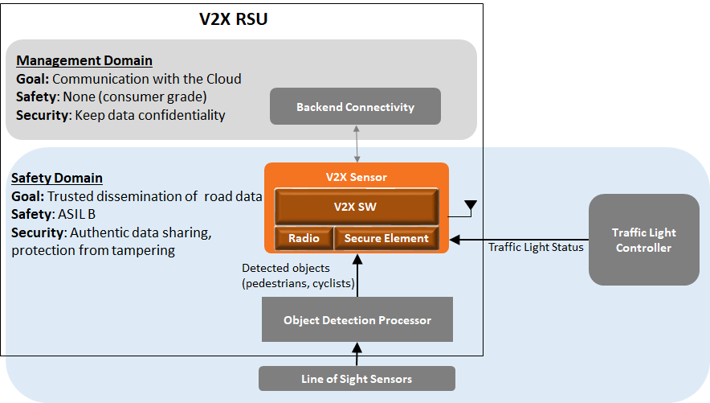
From the conducted Hazard And Risk Analysis (HARA) for the RSU, we identify the key functions that are assigned an integrity level (ASIL) according to ISO26262 and shall assure:
- Integrity of V2X messages
- Operating V2X link
- Reliable data exchange between the V2X sensor and other RSU components
- Correctness and integrity of software flow execution
- Correct functionality of V2X security subsystem
The assignment of ASIL to the above functions dictates a special treatment according to ISO26262 flow, which includes identification of possible failure modes and design of mechanisms for detection and mitigation of those failures if they occur during system operation.
The Functional Safety framework provides a unique perspective on the device reliability, beyond the common Mean Time Between Failures (MTBF) metrics, by prioritizing the functionality of the system which impacts the safety of road users. For a more detailed overview of the concepts presented in this blog, as well as design principles that can be used to achieve the Functional Safety goals, please refer to the “V2X Infrastructure for Safety” whitepaper.






